🚃 실습 목표
FreeRTOS를 사용하여 두 개의 스레드 간 통신 예제 구현
1.1 두 개의 Task 생성 및 osEventFlags, osThreadFlags
(FreeRTOS에서 제공하는 이벤트 플래그 관리 API) 생성
1.1 EventFlag가 define 되어있을 경우 thread1_Task() 에서 osEventFlags 생성
1.2 EventFlag가 define 되어있지 않을 경우 thread1_Task() 에서 osThreadFlags 생성
1.3 EventFlag가 define 되어있을 경우 thread2_Task() 에서 이벤트 플래그 객체 대기
1.4 EventFlag가 define 되어있지 않을 경우 thread2_Task() 에서 thread1의 플래그 대기
1.2 LED2, LED3 토글 및 flag를 출력시켜 두 개의 task(스레드) 간 통신 수행 확인
🚃 RTOS 세팅
최초 설정과 동일하게 사용하였으며 세팅 요소들에 대해 조사는 시간 관계상 하지 않았습니다.
🚃 실습 결과
https://github.com/Tobbyvv/stm32-project/tree/main/rtos_cli
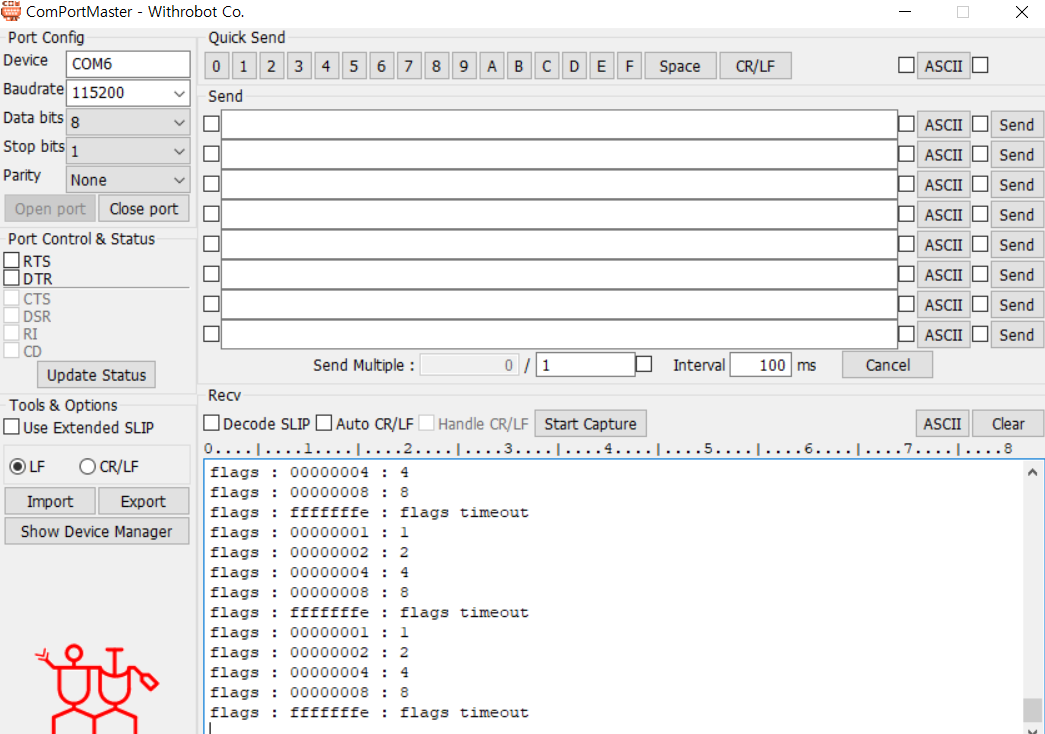
1. 스레드 1에서 이벤트 플래그가 정의되어 있으므로 100ms마다 0 부터 3의 이벤트 플래그를 생성
2. 스레드 2에서 1초 간격으로 이벤트 플래그 수신 체크
3. 스레드 2에서 이벤트 플래그가 체크되면 해당 이벤트 플래그 숫자를 출력
flags 변수의 0번째부터 3번째 비트를 차례로 1로 설정하기 때문에 1,2,4,8 이라는 값이 나옴
4. i가 0일 때 발생하는 delay 때 이벤트 플래그를 수신 받지 못해 flags timeout 발생
#include <stdio.h>
#include "main.h"
#include "string.h"
#include "cmsis_os.h"
#include "app.h"
#define EVENT_FLAGS
// 스레드1, 스레드2 ID 변수
osThreadId_t thread1_handle, thread2_handle;
const osThreadAttr_t thread1_attributes = {
.name = "thread1", // 스레드 이름 지정
.stack_size = 256 * 4, // 스레드 스택 크기 256바이트로 설정
.priority = (osPriority_t) osPriorityNormal, // 중간 우선순위로 설정
};
const osThreadAttr_t thread2_attributes = {
.name = "thread2",
.stack_size = 256 * 4,
.priority = (osPriority_t) osPriorityNormal,
};
static void thread1_Task(void *arg)
{
uint8_t i = 0;
/*
EVENT_FLAGS가 define 되어 있을 경우
osEventFlagsNew를 통해 이벤트 플래그 객체 생성
*/
#if defined(EVENT_FLAGS)
osEventFlagsId_t evt_handle = osEventFlagsNew(NULL);
#endif
for(;;) {
osDelay(100);
#if defined(EVENT_FLAGS)
osEventFlagsSet(evt_handle, 1 << i); // 이벤트 플래그 설정
#else
osThreadFlagsSet(thread2_handle, 1 << i); // 다른 스레드에 플래그 설정
#endif
i++; i%=4; //i 값 -> 0~3
if (i==0) osDelay(1000);
//i가 0일때 1초 후 toggle 0이 아닐때 0.1초 후 toggle
HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin);
}}
static void thread2_Task(void *arg)
{
uint32_t flags;
for(;;) {
#if defined(EVENT_FLAGS)
// 이벤트 플래그 대기
flags = osEventFlagsWait(evt_handle, 0x000f, osFlagsWaitAny, 1000); //osWaitForever);
#else
// 다른 스레드로부터 플래그 대기
flags = osThreadFlagsWait(0x000f, osFlagsWaitAny, 1000);
#endif
printf("flags : %08x : ", flags);
if (flags != osFlagsErrorTimeout ) {
// flags의 각 비트를 검사하여 설정된 플래그를 출력
if (flags & 0x0001) { printf("1\r\n"); }
if (flags & 0x0002) { printf("2\r\n"); }
if (flags & 0x0004) { printf("4\r\n"); }
if (flags & 0x0008) { printf("8\r\n"); }
} else {
printf("flags timeout\r\n");
}
// LED 토글
HAL_GPIO_TogglePin(LD3_GPIO_Port, LD3_Pin);
}}
void app(void)
{
// 운영체제 초기화
osKernelInitialize();
// 스레드 생성
thread1_handle = osThreadNew(thread1_Task, NULL, &thread2_attributes);
thread2_handle = osThreadNew(thread2_Task, NULL, &thread2_attributes);
// 운영체제 시작
osKernelStart();
}
'embedded' 카테고리의 다른 글
| [protocol] UDS 이론 정리 (0) | 2023.10.13 |
|---|---|
| [stm32] Bluetooth 이론 및 실습 (0) | 2023.10.11 |
| [stm32] RTOS 이론 정리 (0) | 2023.09.11 |
| [stm32] I2C 통신 실습 (0) | 2023.09.11 |
| [stm32] I2C 통신 이론 정리 (0) | 2023.09.11 |
