1. 🚙 Bluetooth 란?
2.4GHz 주파수 대역을 사용하는 근거리 무선통신 기술이며 전력 소모가 적고, 연결이 간편한 특징을 가지는 통신이다.
와이파이와 비교하여 정리하면 아래와 같다.
| 특 성 | 와이파이 | 블루투스 |
| 주파수 대역 | 2.4GHz, 5GHz | 2.4GHz |
| 최대 데이터 속도 | 9.6Gbps | 24Mbps |
| 전력 소비 | 높음 | 낮음 |
| 연결 범위 | 100m | 10m |
| 보 안 | 높음 | 낮음 |
| 사용 용도 | 인터넷 연결, 대용량 데이터 전송 | 근거리 장치 연결, 소형 데이터 전송 |
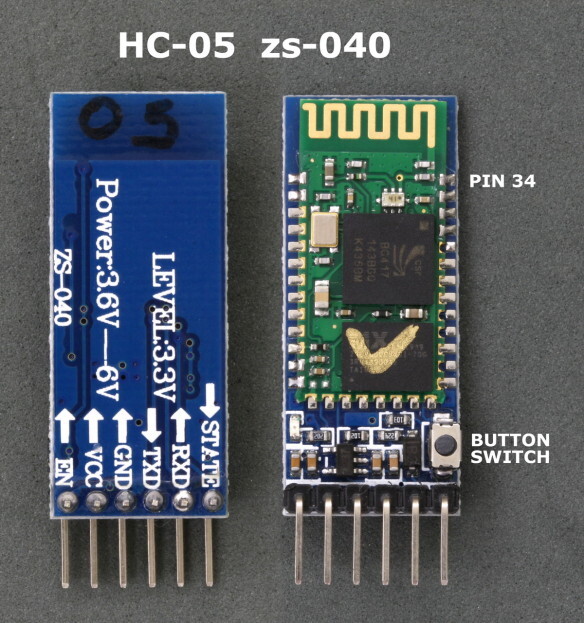
1.1. 블루투스 모듈 [zs-040]
- zs-040은 블루투스 4.0을 지원하며 2.4GHz 주파수 대역, 1Mbps 속도를 가지는 블루투스 통신 모듈이다.
- uart 또한 지원한다.
- F429zi MCU에는 블루투스 기능이 없어 블루투스 모듈이 따로 필요하다
- 해당 모듈을 uart로 사용할 때와 bluetooth로 사용할 때 모두 rxd는 gpio_in로 설정한 PA9 핀에, txd는 gpio_out로 설정한 PA10 핀에 연결한다.
- uart 일때는 5V의 전압을 bluetooth 일떄는 3.3V 전압을 VCC에 연결한다,

2. 🚙 실습 목표
- zs-040 모듈 - MCU 연결
- bluetooth 통신을 위한 bluetooth.h, bluetooth.c 파일 작성
- 스마트폰 -- zs-040 bluetooth 연결됨 확인 및 led 제어, pwm 제어 확인
3. 🚙 실습 결과
https://github.com/Tobbyvv/stm32-project/tree/main/rtos_msg_q
3.1. zs-040 모듈 - MCU 연결
VCC - CN8 7번 3.3V (uart를 사용할 때 5V에 연결)
GND - CN8 11번 GND
RXD - CN12 PA9
TXD - CN12 PA10
3.2. bluetooth 통신을 위한 bluetooth.h, bluetooth.c 파일 작성
2.1 bluetooth.h
<cpp />
#ifndef INC_BLUETOOTH_H_
#define INC_BLUETOOTH_H_
#ifdef __cplusplus
extern "C" {
#endif
void bt_init(void);
void bt_QPut(const void *msg_ptr, uint8_t msg_prio, uint32_t timeout);
#ifdef __cplusplus
}
#endif
#endif /* INC_BLUETOOTH_H_ */
2.2 bluetooth.c
<cpp />
#include <stdio.h>
#include <stdlib.h>
#include <stdarg.h>
#include <stdbool.h>
#include <ctype.h>
#include <string.h>
#include "cmsis_os.h"
#include "main.h"
#include "uart.h"
#include "bluetooth.h"
// 블루투스 메시지 큐의 핸들
static osMessageQueueId_t msgBufQ_handle;
// 블루투스 태스크의 핸들
static osThreadId_t btTask_handle;
// 블루투스 태스크의 속성
static const osThreadAttr_t btTask_attributes = {
.stack_size = 256 * 4,
.priority = (osPriority_t) osPriorityNormal,
};
static void btProc_Task(void *arg);
void bt_init(void)
{
// 블루투스 태스크를 생성
btTask_handle = osThreadNew(btProc_Task, NULL, &btTask_attributes);
if (btTask_handle == NULL) {
printf("%s : %d\r\n", __func__, __LINE__);
while (1);
}
// 블루투스 메시지 큐를 생성
msgBufQ_handle = osMessageQueueNew(5, sizeof(MSG_T), NULL);
if (msgBufQ_handle == NULL) {
printf("%s : %d\r\n", __func__, __LINE__);
while (1);
}
printf("Bluetooth Initialized...\r\n");
}
// 블루투스 메시지 큐에 메시지를 보내는 함수
void bt_QPut(const void *msg_ptr, uint8_t msg_prio, uint32_t timeout)
{
// 블루투스 메시지 큐에 메시지를 보낸다.
osMessageQueuePut(msgBufQ_handle, msg_ptr, msg_prio, timeout);
}
// 블루투스 상태 콜백 함수
void (*cbf)(void);
// 블루투스 상태
uint8_t s_state = 0;
// 블루투스 메시지 버퍼
char msg_buf[101];
// 블루투스 상태 S0 함수
void func_s0(void)
{
// MSG_T 구조체를 선언한다.
MSG_T qTx, qRx;
// 블루투스 상태가 S0이면 "BT status : S0"를 출력
if (s_state == 0) {
printf("BT status : S0\r\n");
// qTx 구조체를 설정
qTx.id = E_MSG_UART2_TX_N_CHECK;
strcpy(msg_buf, "AT");
qTx.len = strlen(msg_buf);
qTx.timeout = 1000;
qTx.pData = (uint8_t *)msg_buf;
// UART에 qTx 구조체를 보냄
uart_QPut(&qTx, 0, osWaitForever);
// 블루투스 상태를 S1로 변경
s_state++;
} else {
// MSG_T 구조체를 메시지 큐에서 가져온다.
osStatus_t sts = osMessageQueueGet(msgBufQ_handle, &qRx, NULL, osWaitForever);
// 타임아웃이 발생하면 블루투스 상태를 S0으로 변경
if (sts == osErrorTimeout) {
s_state = 0;
} else if (sts == osOK) {
switch (qRx.id) {
case E_MSG_BT_RX : {
if (memcmp(qRx.pData, "OK", 2) == 0) {
printf("BT status : S1\r\n");
cbf = func_s1; // callback function
s_state = 0;
return;
}} break;} // switch
s_state = 0;
} // else if (sts == osOK) {}}
// 블루투스 상태 S1 함수
void func_s1(void)
{
// MSG_T 구조체를 선언
MSG_T qTx, qRx;
// 블루투스 상태가 S1이면 "BT status : S1"를 출력
if (s_state == 1) {
printf("BT status : S1\r\n");
// MSG_T 구조체를 메시지 큐에서 가져옴
osStatus_t sts = osMessageQueueGet(msgBufQ_handle, &qRx, NULL, 300);
// 타임아웃이 발생하면 UART에 "AT"을 보냄
if (sts == osErrorTimeout) {
qTx.id = E_MSG_UART2_TX_N_CHECK;
qTx.len = strlen("AT");
qTx.timeout = 1;
qTx.pData = (uint8_t *)"AT";
uart_QPut(&qTx, 0, 0);
} else if (sts == osOK) {
// 메시지 큐에서 가져온 메시지의 ID가 E_MSG_BT_RX 이면
if (qRx.id == E_MSG_BT_RX) {
// 메시지 큐에서 가져온 메시지의 데이터를 UART에 다시 보냄
qTx.id = E_MSG_UART2_TX;
qTx.len = qRx.len;
qTx.pData = qRx.pData;
uart_QPut(&qTx, 0, 0);
}}}}
static void btProc_Task(void *arg)
{
// 블루투스 상태 콜백 함수를 func_s0로 설정
cbf = func_s0;.
printf("Bluetooth Thread Start...\r\n");
osDelay(500);
cbf(); // 블루투스 상태 콜백 함수호출
for (;;) {
cbf();
}}
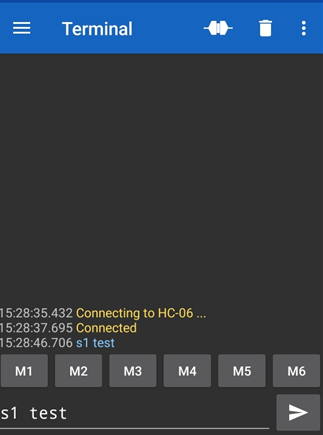
3.3. 스마트폰 -- zs-040 bluetooth 연결됨 확인 및 led 제어, pwm 제어 확인
bluetooth 연결은 성공하였으나 무료 어플의 terminal을 통해 메시지를 전달하였으나 s1 함수가 동작하지 않아
최근에는 bluetooth 4.0을 거의 사용하지 않는것으로 보아 어플에서 4.0 버전 간의 통신을 지원하지 않는것으로 보인다.
(※ 4.0 버전에 맞는 메시지 송수신이 가능한 bluetooth 어플 apk 파일을 찾아보았으나 찾지 못하였음)
'embedded' 카테고리의 다른 글
| [protocol] CAN 통신 이론 정리 (0) | 2023.10.14 |
|---|---|
| [protocol] UDS 이론 정리 (0) | 2023.10.13 |
| [stm32] RTOS 실습 (0) | 2023.09.18 |
| [stm32] RTOS 이론 정리 (0) | 2023.09.11 |
| [stm32] I2C 통신 실습 (0) | 2023.09.11 |
